

Capstone Plane
Huge autonomous plane designed and built by 8 students in 8 months
March 1, 2021
This was a very intense project. Our team was limited on time and manpower for the scale of what we were making. We had 5 mechanical and 3 electrical engineering students on our team. The mechanical sub-team was responsible for designing the aircraft to fit our sponsor's requirements including payload capacity and flight time. Meanwhile, electrical was responsible for implementing the autopilot system and creating a super fast data acquisition system that could be used to verify the aerodynamic performance of the plane.

Above is the completed plane on its maiden flight.
Requirements
- Complete the project in less than 8 months (late September to early April)
- Measure and record air pressure along the profile of the wing
- 100km range (endurance)
- 20lbs payload capacity
- Low stall speed around 30 knots
- Autonomous flying capability
- Can be disassembled for transport
Sensing Air Pressure on Different Parts of a Wing
The main part of this project that I was involved in was the sensing air pressure on different parts of the wing. To handle this task, we used many pressure sensors and embedded them into the wing. We built a custom circuit board to carry 4 of these sensors and put one in each wing. Pictured below is how we fit them into the profile of the wing.



The brains of the Data Acquisition system was a Teensy 3.6. This microcontroller board communicated with the pressure sensors over I2C. This is a protocol normally reserved for short distances between chips, however we had almost 2m of wire between the Teensy and the sensors. Therefore we developed a custom shield for the Teensy to boost the signal to a higher voltage and to handle the capacitance of the long line.
We also had to add I2C multiplexers as we had a total of 13 pressure sensors but only 2 I2C ports.
I wrote the C++ firmware for the data acquisition system, creating a mini real time operating system that scheduled tasks such as polling sensors, writing to SD card and communicating with the flight controller according to priority and timing requirements.
Below is the final output, where we have the logged values of pressure sensors. I wrote the logging code to be compatible with ArduPilot logs, so that they could be viewed in MissionPlanner.

These values were also shown in MissionPlanner in-flight in real time as the Data acquisition system was well integrated with the flight controller and Mission Planner.
Some more pictures of this project below.

The '3D' airspeed sensor that can sense airspeed as a vector rather than a scalar value.

Team photo at the capstone fair.

Connectors we used on the carbon fiber rods that went through the wings. The pressure sensors and wires were embedded in the wings, but the wings had to be detachable from the fuselage.

This is the upper mold we manufactured for laying up the top carbon fibre shell.
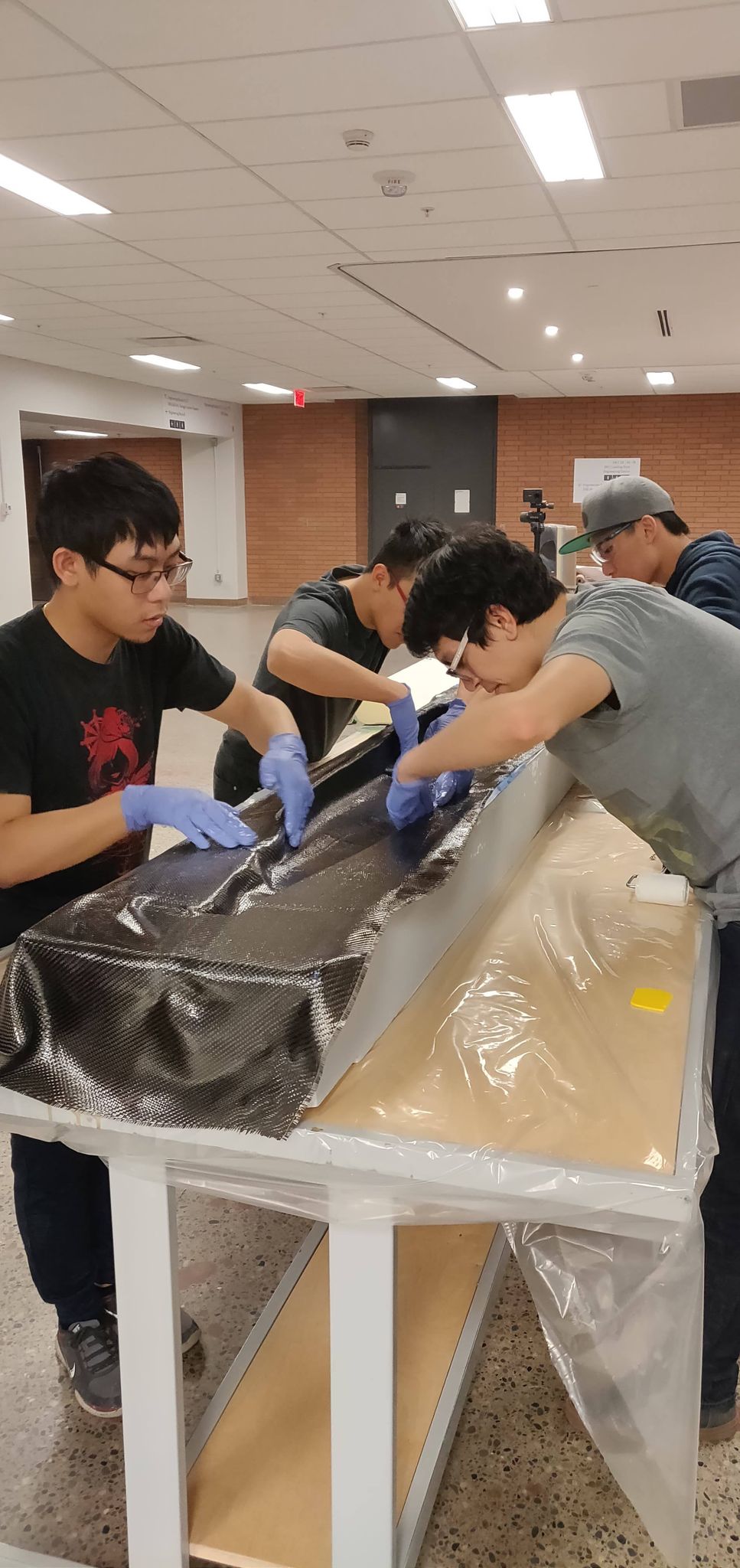
In the process of laying up the carbon fiber shell.
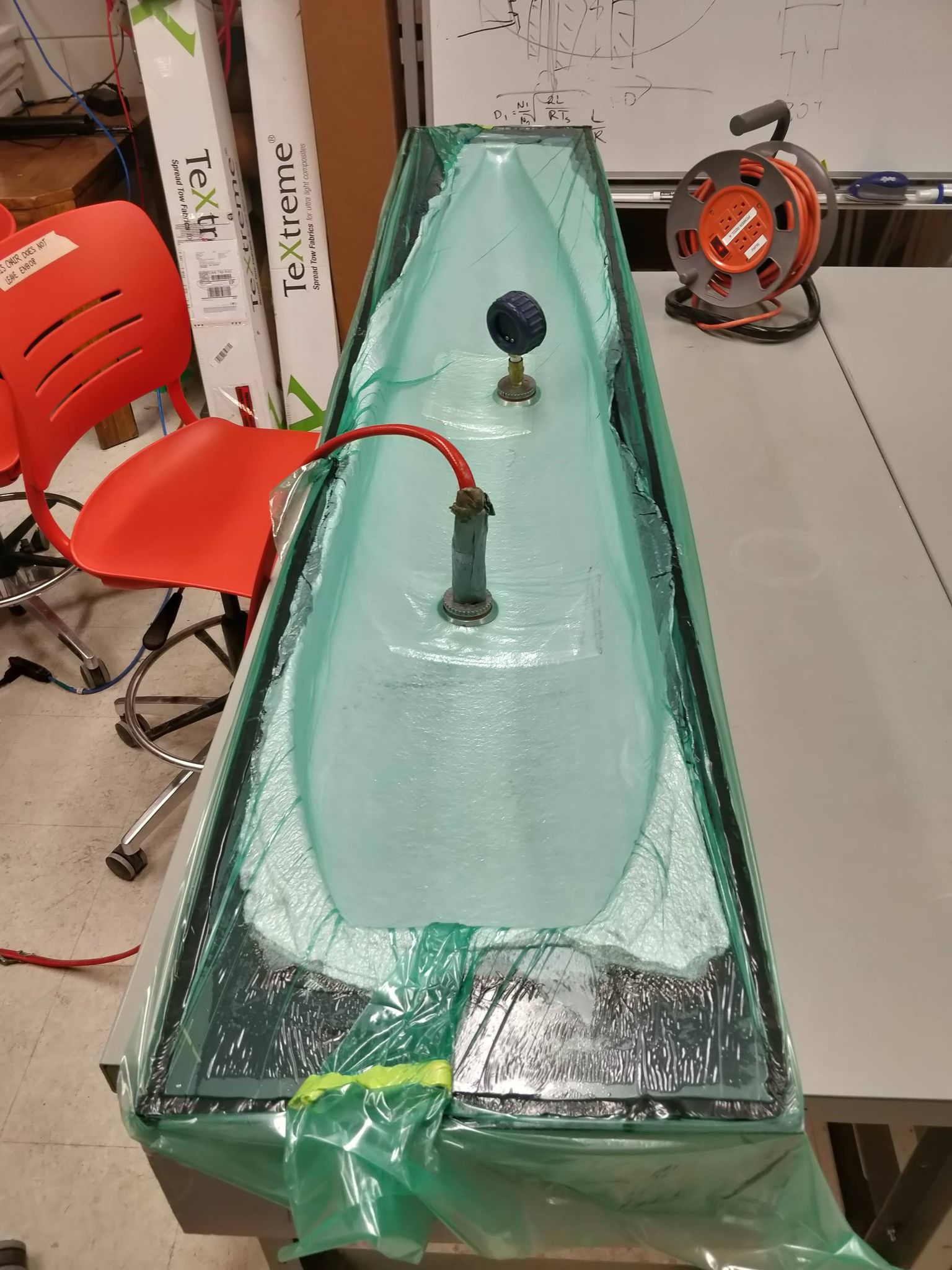
Leaving the epoxy to cure overnight under pressure.
Part of the team with the plane after its maiden flight.
Related Posts

UAV Competition - Plane Design
What Went Into Designing the 2017 UAV Competition Plane

UAV Competition - Trip
How a Rookie Team Competed Successfully Against More Established Teams